工勘描述
| 项目 | 要求 |
|---|---|
| 适用场景 | 道路、园区道路、禁停区域内的车辆违停检测与车牌识别 |
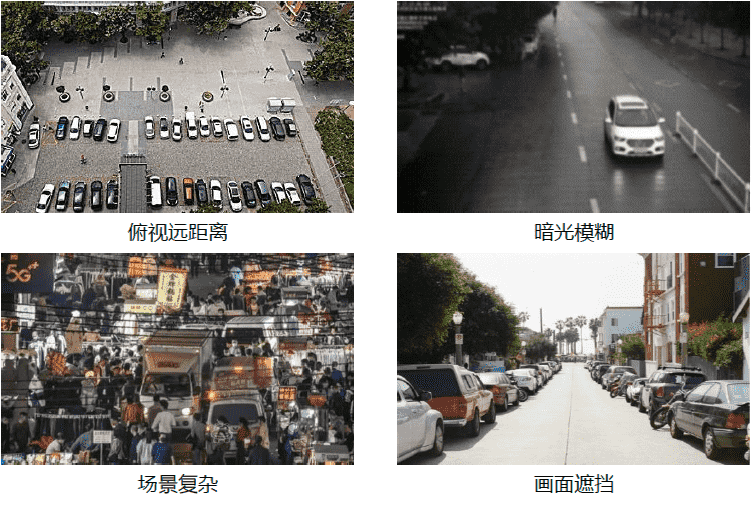
| 禁用场景 | 光、强光、弱光、反光、雨雾、画质模糊等场景画面剧烈抖动、远距离(>10m)识别条件车牌过小、车辆快速行驶、车牌被遮挡 |
| 支持功能 | 支持车辆进入规定区域内违停判断支持单层蓝牌、黄牌、绿牌(新能源)车牌号与车牌颜色识别 |
| 相机要求 | 推荐200万~500万像素,可见光,画质清晰,无畸变 |
| 目标大小 | 目标大小不小于画面大小5%,车牌区域需要清晰可辨 |
| 识别距离 | 小于10m最佳(200万@6mm) |
| 配置要求 | 置信度与算法参数保持默认值 |
| 算法逻辑 | 车辆违停检测&违停车辆车牌识别 |
算法检测示例
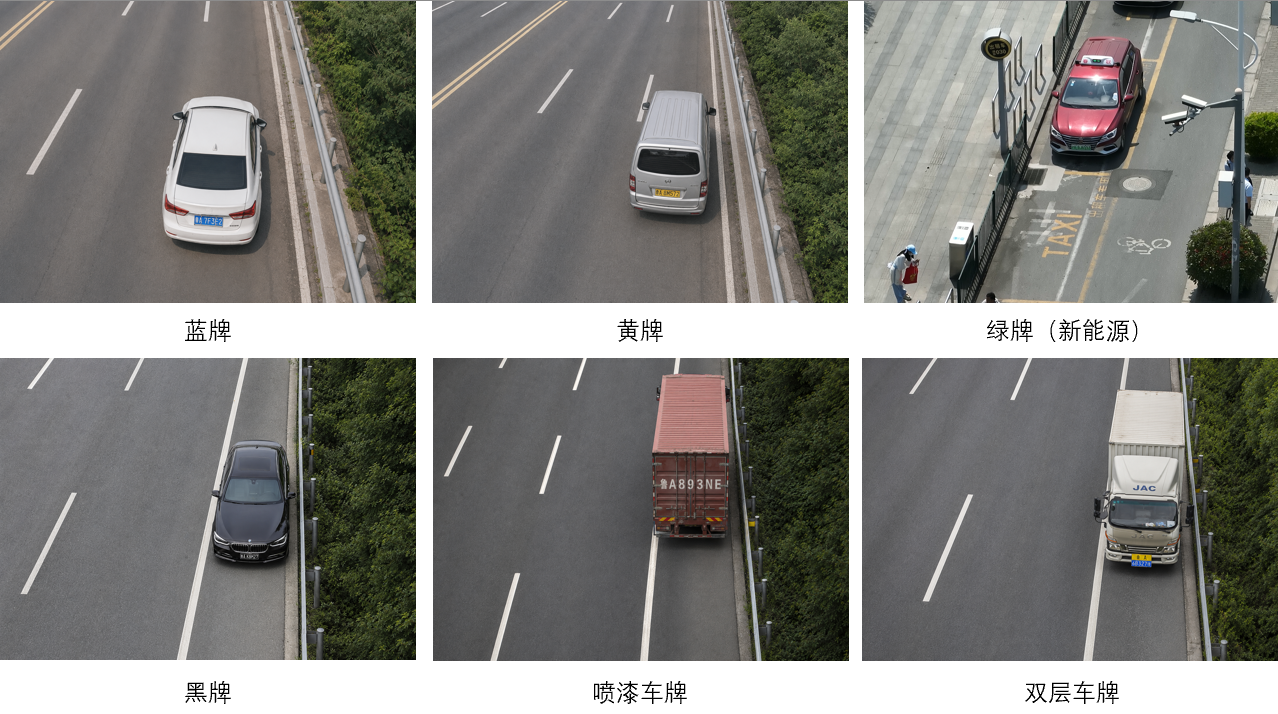
推荐场景

禁用场景
如何配置使用这个算法?
1. 配置车牌底库
第一步: 点击【底库管理】-【车牌底库】中的添加,如下图所示。
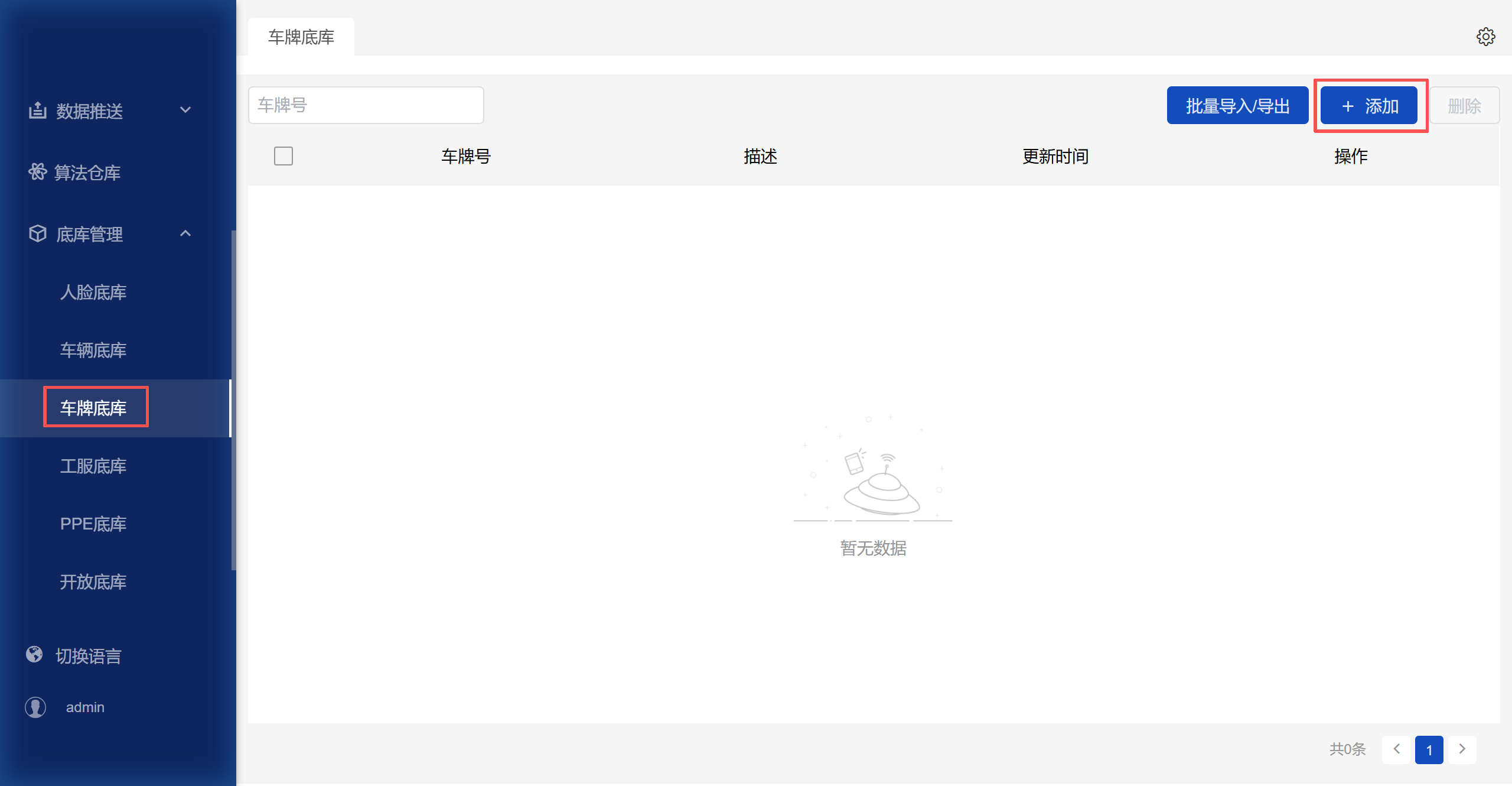
第二步: 在弹出的添加管理页面中输入【车牌号】,如“鲁A 1234*(自行输入)”。完成后点击【保存】。

第五步: 完成后车牌底库自动生效。
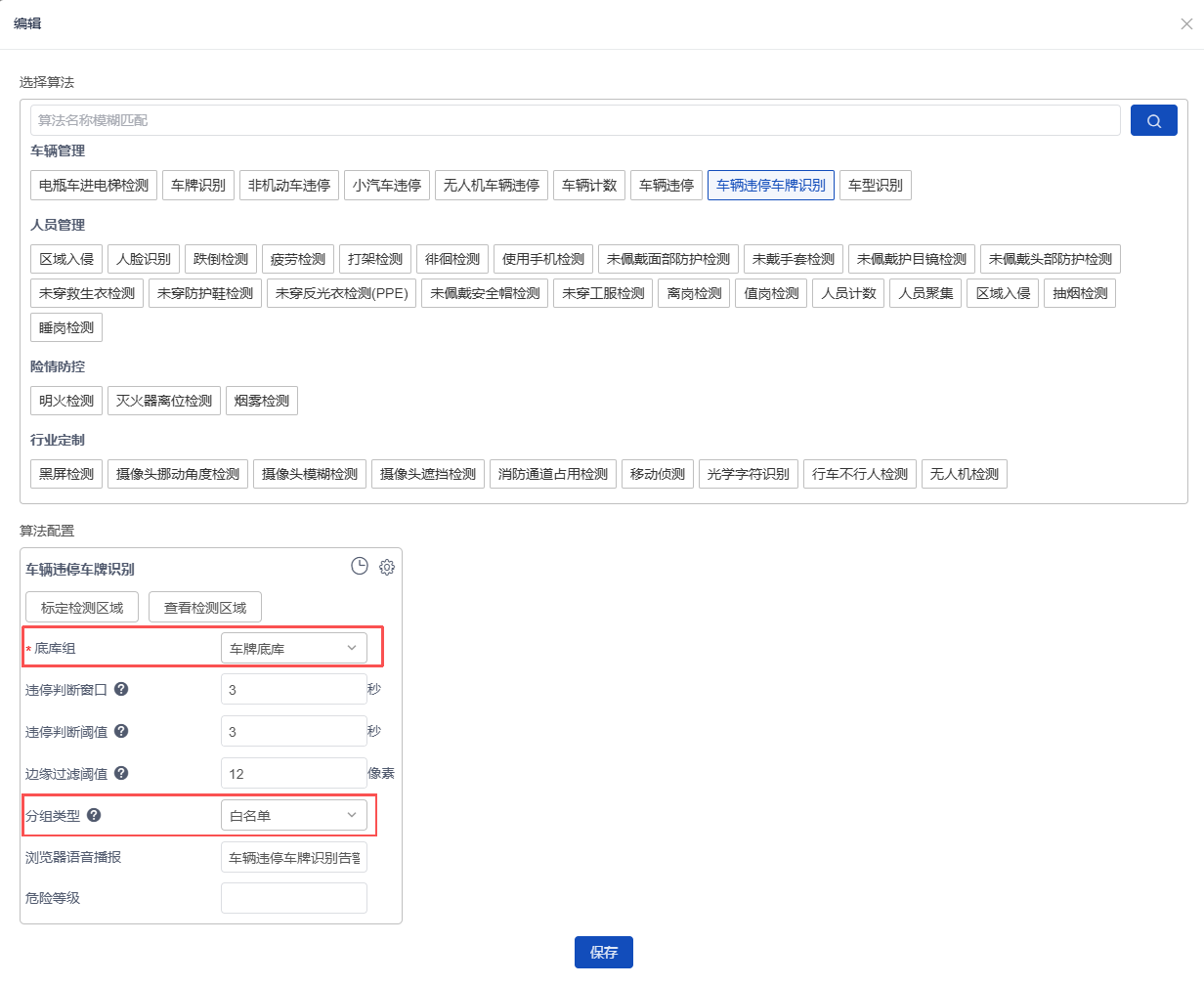
2. 配置车牌算法
在选择算法中选择【车辆违停车牌识别】算法,选择【底库组】,如“车牌底库”,选择【分组类型】:黑/白名单(黑/白名单的意义在本文中有介绍),完成后点击保存。完成后点击【保存】。
黑/白名单解释
在摄像头绑定车牌识别算法的时候,车牌识别算法需要绑定你配置的车牌底库。绑定底库的时候,需要选择是以 黑名单 方式还是 白名单 方式,那么这两种方式有什么区别呢?
- 黑名单逻辑:当摄像头画面中出现的车牌和底库的任意一个车牌是同一个车牌时,报警;
- 白名单逻辑:当摄像头画面中出现的车牌和底库的任意一个车牌都无法匹配时,报警。
Q1: 出现误报、漏报如何处理?
误报:
1.车辆识别错误:
- 提高【车辆检测置信度】,如0.6,尝试以0.1的步长逐步提高车辆检测置信度,上限值建议0.8。
2.车牌识别错误:
- 提高【车牌识别置信度】,如0.6,尝试以0.1的步长逐步提高车牌识别置信度,上限值建议0.8。
漏报:
1.车辆识别不到:
- 在推荐场景与算法使用约束下,出现漏报。降低【车辆检测置信度】,如0.4。下限值建议0.3。
2.车牌识别不到:
- 在推荐场景与算法使用约束下,出现漏报。降低【车牌识别置信度】,如0.4。下限值建议0.3。
置信度越高,模型对目标的判断越严格,可减少将其他目标误识别为任务目标的情况,但过高可能导致漏检。
置信度越低,模型越容易保留疑似任务目标,可提高召回率,但可能带来更多误报。
若仍出现大量肉眼可见的误报、漏报,请联系售后处理。
参数配置方法,如下图。

回复