
由于作业环境的动态变化与自然环境因素的影响,矿山运输车轨道上可能存在石块、设备等障碍物。驾驶员如无法及时发现,将造成安全隐患。为此,采用人工智能算法开发了机器视觉轨道障碍物检测系统。自动识别轨道上障碍物,并测量障碍物距离车辆的距离,实时提供距离信息。实现轨道障碍物自动检测与预警。
背景介绍
目前,矿山运输车行进的轨道上可能存在障碍物。这些障碍物主要来自作业环境与自然环境的动态变化。在作业环境中,由于运输车超载可能出现矿石的掉落,如未能及时清理,可能造成安全隐患。此外,部分轨道暴露于外部环境,由于自然因素的影响,可能出现落石。正常情况下,轨道的完整性可以保证。造成轨道区域的不安全因素是位于轨道内部的异物。通常驾驶员通过肉眼观察隧道内状况,鉴于行驶环境照明不足、行驶空间狭小等特点,驾驶员很难对前方出现的异常目标作出快速反应,仅依靠驾驶员视觉进行障碍物识别,难以保证行车安全。而且,由于驾驶员长期处于驾驶环境,可能出现驾驶疲劳问题。因此,实时监测轨道障碍物是保障矿车行驶安全的必要手段。
现有监测手段存在以下问题:
-
人工监测易漏检:由于隧道内光线不足、空间受限,且考虑到驾驶员的疲劳问题,可能造成轨道内异常目标的漏检。或者难以对异常目标作出快速反应。
-
激光雷达价格昂贵:激光雷达能够反馈物体的距离信息。但是其价格昂贵,并且涉及到复杂的点云处理,需要大量的算力设备支撑。
为此,采用人工智能算法实现:
-
轨道内障碍物检测:对轨道目标进行分割,并识别轨道内的人员、设备、石块等异常目标。当发现这些异常目标位于轨道内时,产生告警。
-
轨道内障碍物测距:基于深度学习视觉算法对轨道内目标检测,并通过像素-空间位置变换,自动计算障碍物距离运输车车体的距离。
系统构成
分析系统包括后台管理系统与AI算法两部分。两部分详情如下。
1. 后台管理系统
后台管理系统负责实时画面查看、视频接入、告警管理与数据推送。
-
实时画面:对监控画面实时预览,可用于告警核验或实况监测。可在实时画面中查看AI检测结果。
-
视频接入:将摄像头接入后台管理系统,并将摄像头绑定轨道障碍物检测算法,使摄像头具备AI分析能力。
-
告警管理:产生的告警图片、短视频以及放矿地点、告警时间等数据存储至磁盘与数据库,并可进行检索、查看、处理与导出。
-
数据推送: 将产生的告警数据通过http协议推送至第三方平台,这个告警数据是实时障碍物目标坐标与距离数据,包括告警图片与结构化数据。
后台管理系统为B/S架构设计,用户可在局域网内通过个人电脑主机访问系统,查看画面与告警。

2. 障碍物检测算法
障碍物检测算法包括障碍物目标检测与目标测距两部分。
-
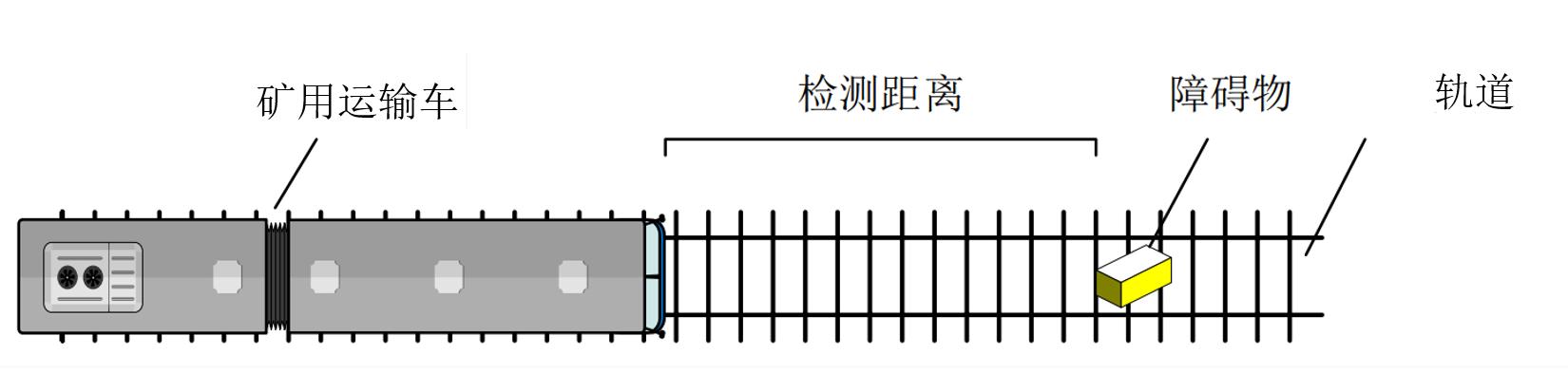
障碍物目标检测算法:识别轨道与障碍物目标。当障碍物目标位于轨道内时产生告警。如图1,前方存在矿车,且障碍物目标位于轨道内,需产生告警。
-
障碍物目标测距算法:基于目标像素与空间坐标变换,实时计算障碍物目标距离车头距离。驾驶员根据障碍物距离信息,采取合理的处理手段。
障碍物检测算法基于深度学习视频理解算法,自动识别障碍物目标与距离。具备高效稳定、精准低价的特点。纯视觉方案部署简单,算力依赖较低,实时性好,适用于复杂场景的异物检测。
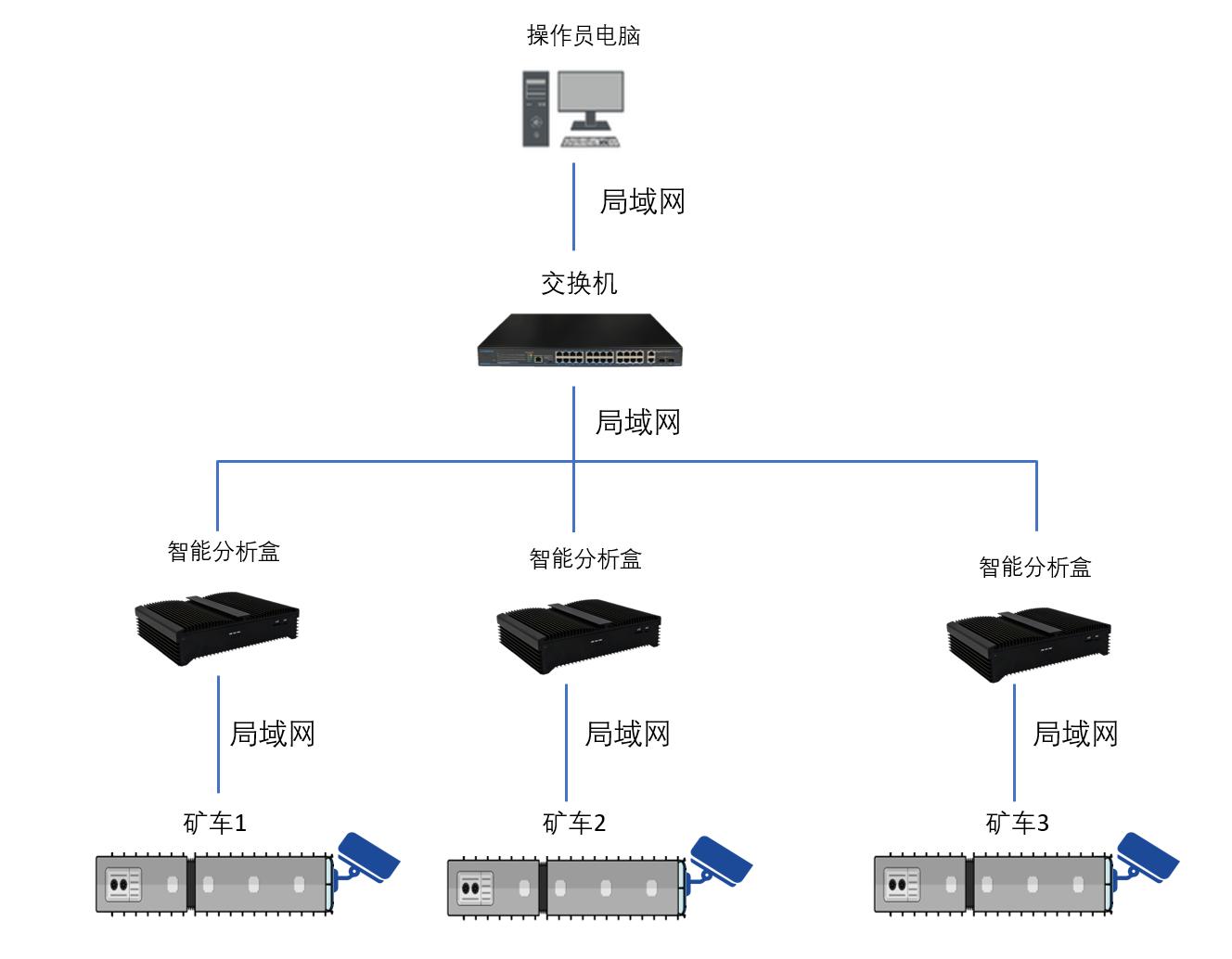
部署组网
摄像头、智能分析盒、控制平台、放矿机与料斗部署组网如下图。
-
摄像头-智能分析盒:两者之间通过局域网进行连接。摄像头的rtsp/rtmp视频流,通过局域网接入智能分析盒进行智能分析。
-
智能分析盒-控制平台: 智能分析盒内置轨道障碍物检测算法,实时分析异物目标与距离。操作员可在局域网内查看检测结果。
项目图集
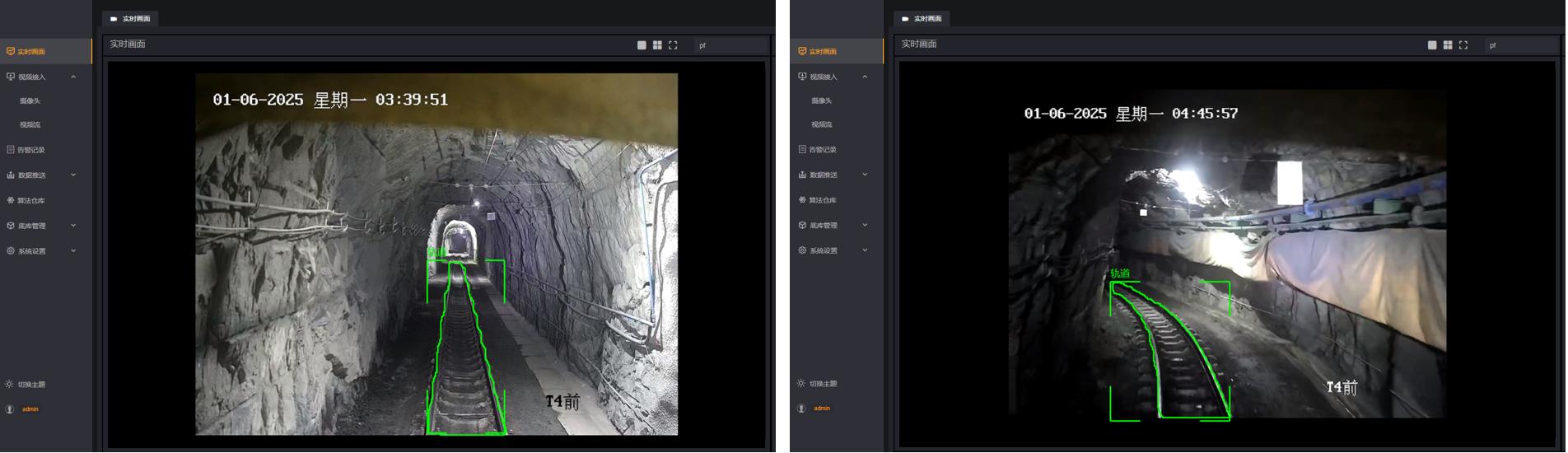
上图为障碍物算法现场检测图。
- 左图,为直道情况下轨道目标检测图。
- 右图,为弯道情况下轨道目标检测图。
应用成效
依托边缘计算与人工智能视频分析领域的创新能力与工程化实践,智驱力机器视觉轨道障碍物检测系统在国内多所矿井率先落地。产品投产应用后取得了如下成效。
小障碍物漏报事件降低90%
与人工相比,机器视觉对小障碍物时间的漏报率降低90%。极大提升矿车运行安全性。
远距离异物发现时间提前2-3秒
与人工相比,机器视觉能够及时发现远距离异物目标,发现时间提前2-3秒,给异常处理提供了缓冲时间。
相比对激光雷达方案成本降低80%
与激光雷达方案相比,视觉分析感知硬件与算力硬件,成本大幅降低,具备大规模产业落地能力。
回复